1. INTRODUCCIÓN El método de Muskingum y sus variantes están bien establecidos en la literatura sobre el enrutamiento de inundaciones. Tradicionalmente, sus parámetros K y X se han determinado mediante calibración utilizando hidrogramas medidos, de entrada y salida. Una versión mejorada se debe a Cunge (4), quien demostró que los parámetros K y X estan relacionados con el problema físico, eliminando así la necesidad de calibración, mejorando así la capacidad predictiva del método. Con la ayuda de los resultados de Cunge, los cálculos pueden realizarse fijando constantes los parámetros de enrutamiento (5), o utilizando parámetros variables (6,7). El método de parámetros constantes tiene la ventaja de simplicidad, aunque ésto se logra a costa de alguna pérdida de detalle. Por otro lado, el modo de parámetros variables deja de lado la simplicidad a cambio de un mayor detalle en la definición del hidrograma. Dadas estas diferencias, es de esperar que ambos enfoques continuen utilizándose en el futuro. Cuando está en juego la simplicidad, se aplica el método de parámetros constantes; cuando es necesario una mayor precisión, el método de parámetros variables es recomendable. Los cálculos para el método de parámetros constantes pueden ser de dos formas. La forma convencional es especificar intervalos de tiempo y espacio Δx y Δt; los parámetros K y X se calculan a partir de éstos. Una forma alternativa es especificar K y X, y calcular Δx y Δt en base a éstos. Como se muestra aquí, la elección apropiada de los parámetros conduce a una simplificación considerable en la ecuación de enrutamiento. Esto permite obtener una solución razonable al problema del enrutamiento de inundaciones, con un mínimo de esfuerzo. 2. MÉTODO MUSKINGUM
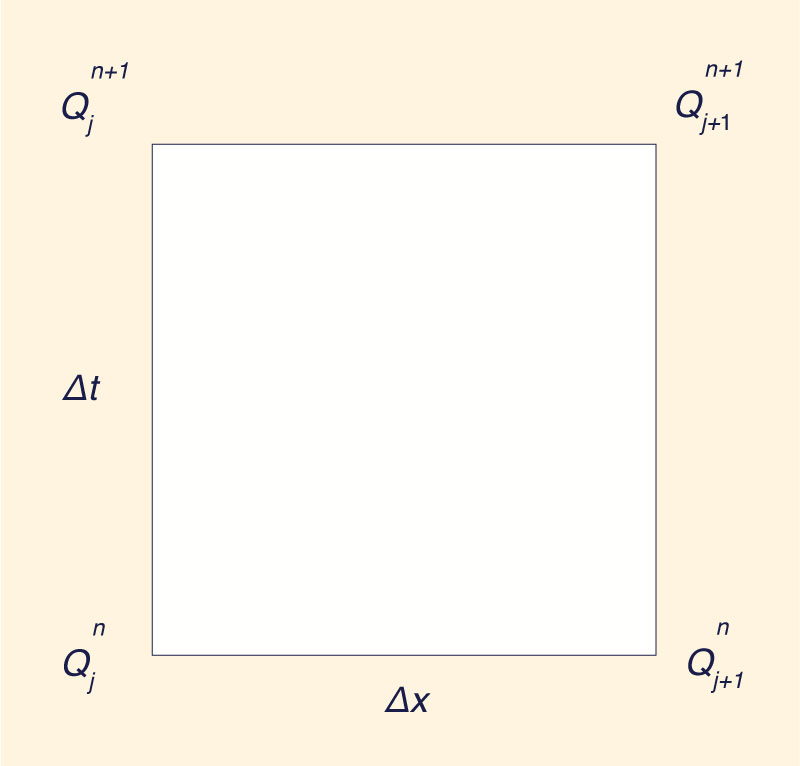
En el método Muskingum, el caudal de flujo Qj+1n+1 se expresa de la siguiente manera
en la cual C1, C2, y C3 son coeficientes definidos como sigue:
3. ECUACIÓN DE ENRUTAMIENTO SIMPLIFICADA DE MUSKINGUM En las Ecs. 2-4, si Δt /K y X son especificadas como sigue:
y
resulta que:
lo cual conduce a la forma simplificada de la ecuación de enrutamiento de Muskingum de la siguiente manera:
El cumplimiento de las Ecs. 5 y 6 implica que Δx y Δt está fijado. En efecto, K se define como el tiempo que tarda un caudal de inundación en recorrer la distancia Δx con la celeridad c:
Por lo tanto, de las Ecs. 5 y 9:
en la cual C = número de Courant. La Ecuación 10 especifica que la celeridad de la onda de inundación c debe ser igual a la "celeridad de la malla" Δx /Δt. Cunge (4) ha demostrado que el parámetro X puede estar relacionado con el problema físico de la siguiente manera:
en la cual q = caudal por unidad de ancho; y So = pendiente de fondo. Las Ecuaciones 6 y 11 conducen a:
en la cual D = número de Reynolds de la malla. La Ecuación 12 especifica que la difusividad del canal q /(2So) debe ser igual a la "difusividad de la malla" (cΔx)/2. Las Ecuaciones 10 y 12 permiten el cálculo de Δx y Δt en función de las variables de flujo. En este sentido, debe tenerse en cuenta que el intervalo de espacio calculado a partir de la Ec. 12 es la misma que la "longitud característica" en la que se basa el método de Kalinin-Milyukov (6). Si bien se reconoce esta similitud, el método propuesto en este documento tiene su propio mérito, ya que conduce a una ecuación de enrutamiento (Ec. 8) mucho más simple que la del método de Kalinin-Milyukov.
De las Ecs. 10 y 12, los intervalos de tiempo y espacio están dados por las siguientes fórmulas:
y
Para canales naturales, la fricción del canal y la forma de la sección transversal se establecen implícitamente en la relación caudal-área en estado permanente.
en la cual Q = caudal, A = área de la sección transversal; y α y β = coeficiente y exponente, respectivamente.
en la cual B = ancho superior. De las Ecs. 13 y 16 se obtiene:
y
Al igual que con todos los modelos de parámetros agrupados (5), se requiere cierto juicio en la elección de las variables hidráulicas de referencia (es decir, q, A y B en las Ecs. 16-18) en el cual basar los cálculos de Δx y Δt. El uso de cantidades medias suele ser suficiente desde el punto de vista práctico. 5. PRUEBA DEL MODELO La prueba de un modelo matemático generalmente depende de si el modelo puede reproducir datos medidos en el campo. Sin embargo, si hay discrepancias es muy difícil, y a veces imposible, determinar si se deben a errores en la solución numérica, en la estimación de los parámetros, o en los datos medidos. Un procedimiento actualmente cuestionado consiste en agrupar todos estos errores, y ajustar los parámetros del modelo para que estén de acuerdo con los datos medidos, en lo que se ha dado en llamar "calibración".
Un mejor enfoque consiste en aislar las fuentes de error para estudiar sus efectos por separado. Esto se hace mediante la realización de una prueba hipotética y una prueba de datos reales.
Prueba hipotética. Para probar el método propuesto en este artículo, se estableció una prueba hipotética utilizando el método del ejemplo clásico de Thomas (10). Se realizaron las dos siguientes simulaciones: (1) simulación de prueba usando el método simplificado; y (2) simulación de control usando el método convencional. En la simulación de prueba, se tomó X = 0, y K = Δt. En la simulación de control, los intervalos de espacio y de tiempo se especificaron en Δx = 25 millas (40 km), y Δt = 6 hr. Esto resultó en X = 0.228 y K = Δt /1.5. En ambas pruebas se utilizaron las siguientes variables hidráulicas: (1) caudal base = 50 pies3/s (1.4 m3/s); (2) caudal pico = 200 pies3/s (5.7 m3/s); (3) caudal de referencia = 125 pies3/s (3.54 m3/s); (4) longitud del canal = 500 millas (800 km), y (5) pendiente de fondo = 1 pie/milla (0.19 m/km). Los resultados calculados para el flujo de salida máximo = 177 pies3/s (5.1 m3/s), el tiempo de traslación = 128 horas, y la forma del hidrograma fueron esencialmente los mismos para ambas simulaciones. Por lo tanto, la demostrada independencia de la malla debe tomarse como una medida de la solidez del método simplificado.
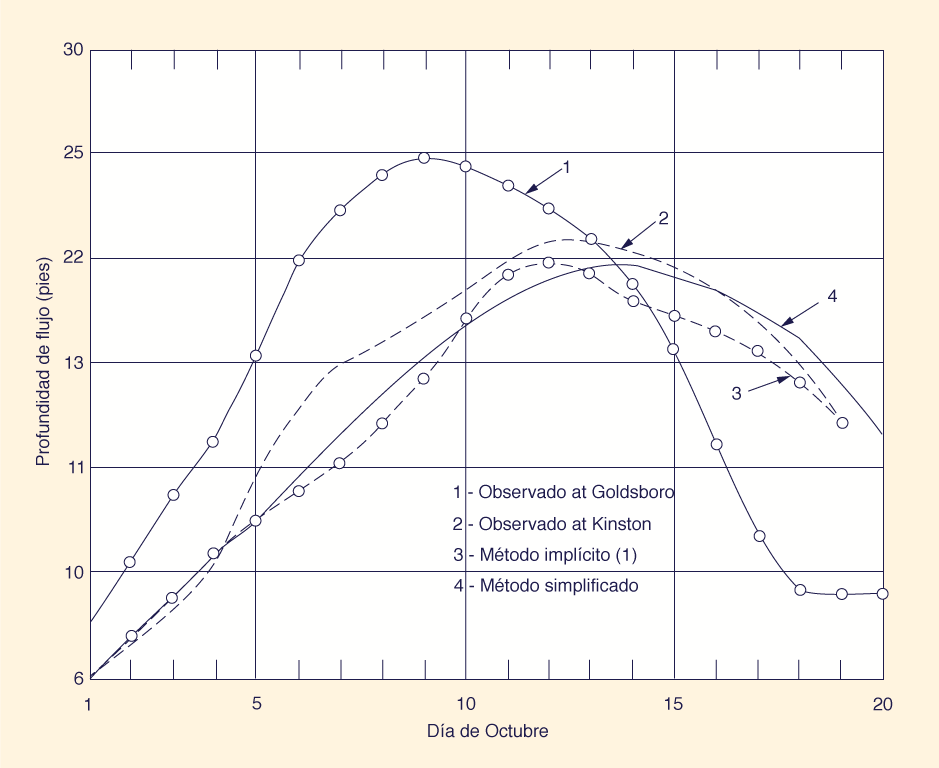
Prueba de datos reales. Se estableció una prueba de datos reales utilizando datos de inundaciones medidos por el Servicio Geológico de los Estados Unidos en el tramo de 45 millas
El área de la sección transversal de referencia y el ancho superior se eligieron para corresponder a la profundidad hidráulica promedio en el tramo: A = 17,900 pies2 (1,660 m2); y B = 2,900 pies
en Goldsboro (entrada) y Kinston (salida), Carolina del Norte (1 pie = 0.305 m).
Se hacen las siguientes observaciones (Fig. 2):
Se desarrolla una ecuación simplificada de enrutamiento con el método de Muskingum. El método se basa en la especificación de los intervalos de tiempo y espacio Δx y Δt de tal manera que X = 0 y K = Δt. En este caso, la ecuación de enrutamiento se reduce al cálculo de un simple promedio.
APÉNDICE I. DERIVACIÓN DEL TÉRMINO DEL FLUJO LATERAL La ecuación de enrutamiento de Muskingum con flujo lateral es la siguiente:
en la cual
Desde que c = Δx / K, y para la condición K = Δt, y X = 0, la Ec. 20 se reduce a lo siguiente:
APÉNDICE II. BIBLIOGRAFÍA
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 211231 |
| Documents in Portable Document Format (PDF) require Adobe Acrobat Reader 5.0 or higher to view; download Adobe Acrobat Reader. |