|
RESUMEN
Las características de propagación de varios tipos de ondas poco profundas en el flujo de un canal abierto son calculadas sobre la base de la teoría de la estabilidad lineal. Se deriva las funciones de celeridad y atenuación de las ondas cinemática, difusiva, dinámica permanente,
dinámica y de gravedad. Para el caso más general, es decir, el modelo de onda dinámica, las características de propagación son expresadas en función del número de Froude del flujo uniforme permanente y el número de onda adimensional del componente no permanente del movimiento. Para el modelo dinámico, el espectro del número de onda se divide en tres grupos: (1) Un grupo de gravedad, que corresponde a un número de onda grande, en la cual la celeridad es la celeridad de la onda de gravedad; (2) un grupo cinemático, que corresponde a un número de onda pequeńo, en la cual la celeridad es la celeridad de la onda cinemática; y (3) un grupo dinámico, que corresponde a los valores medios del espectro, en la cual la celeridad se encuentra entre los valores
de celeridad cinemática y de gravedad.
|
1. INTRODUCCIÓN
A través de los ańos, varios investigadores han intentado aclarar el fenómeno de la propagación de ondas poco profundas en el flujo en un canal abierto. Quizás el más esclarecedor de estos estudios es el reportado en el artículo clásico de Lighthill y Whitham, que analizó en detalle el concepto de onda cinemática y lo contrastó con el de onda dinámica (5). La fórmula de Lagrange para la celeridad de las ondas de gravedad poco profundas también ha sido objeto de considerable atención en la literatura (3). A pesar de los avances logrados en la comprensión del fenómeno físico, aún no se ha formulado una teoría coherente que explique tanto la celeridad como las características de atenuación. En este sentido, la teoría de la estabilidad lineal puede ser utilizada como una herramienta eficaz no solo para proporcionar un análisis de primera aproximación, sino también para revelar información valiosa sobre la física del problema (6).
El análisis que aquí se presenta aplica la teoría de la estabilidad lineal al conjunto de ecuaciones que gobiernan el movimiento del flujo en canales abiertos. Las ecuaciones son las denominadas ecuaciones de Saint Venant, que son expresiones analíticas de los principios de conservación de masa y movimiento (momento) (1). Las conclusiones se refieren a la magnitud de la celeridad y atenuación de varios tipos de ondas en aguas poco profundas, expresadas como una función del número de Froude del flujo uniforme permanente y un número de onda adimensional del componente no permanente del movimiento.
2. ECUACIONES DE GOBIERNO
Las ecuaciones que gobiernan el flujo no permanente unidimensional en canales anchos de sección transversal rectangular, expresadas por unidad de ancho de canal, son la ecuación de continuidad (4):
∂d ∂u ∂d
u ____ + d ____ + ____ = 0
∂x ∂x ∂t
| (1) |
y la ecuación de movimiento (2):
1 ∂u u ∂u ∂d
____ _____
+ ____ _____ + _____ + (Sf - So ) = 0
g ∂t g ∂x ∂x
| (2) |
en el cual u = velocidad media en una sección vertical; d = profundidad del flujo; g = aceleración de la gravedad; Sf = pendiente de fricción; y So = pendiente de fondo.
La pendiente de fricción Sf está directamente relacionada con el esfuerzo cortante de fondo τ por la expresión (2):
en la cual γ = peso unitario del agua.
Siguiendo la forma habitual de los cálculos de estabilidad, las Ecs. 1 y 2 deben satisfacer el flujo no perturbado para el cual u = uo; d = do; y τ = τo, así como el flujo perturbado para el cual u = uo + u' ; d = do + d' ; y τ = τo + τ' (7).
El superíndice en las variables de flujo representa una pequeńa perturbación del flujo uniforme permanente. Por lo tanto, todos los términos cuadráticos de las componentes fluctuantes pueden despreciarse debido a un razonamiento de orden de magnitud.
La sustitución de las variables de perturbación en las Ecs. 1, 2, y 3, después de linealizar, lleva a lo siguiente (5):
∂d' ∂u' ∂d'
uo ____ + do ____ + ____ = 0
∂x ∂x ∂t
| (4) |
1 ∂u' uo ∂u' ∂d' τ' d'
____ _____
+ ____ _____ + _____ +
So ( _____ - _____ ) = 0
g ∂t g ∂x ∂x τo do
| (5) |
en la cual:
El esfuerzo cortante τ puede relacionarse con la velocidad media de la siguiente forma:
en la cual:
El valor Cf es el coeficiente de Chezy; y ρ = densidad del agua. Considerando la Ec. 7, la Ec. 5 se puede reescribir como sigue:
1 ∂u' uo ∂u' ∂d' u' d'
____ _____
+ ____ _____ + _____ +
So ( 2 _____ - _____ ) = 0
g ∂t g ∂x ∂x uo do
| (9) |
En la mayoría de las aplicaciones prácticas, se prefiere la ecuación de Manning a la ecuación de Chezy. Esta última, sin embargo, tiene la ventaja de la no dimensionalidad, y es por esta razón que se usa aquí. Además, la constante Cf es consistente con el supuesto de una pequeńa perturbación.
3. MODELOS DE ONDA
La propagación de las ondas en aguas poco profundas está controlada por el balance de las diversas fuerzas incluidas en la ecuación de movimiento. En la Ec. 2, el primer término representa la inercia local, el segundo la inercia convectiva, el tercer término la diferencia de presiones y el cuarto representa la fricción y la pendiente de fondo. Se pueden construir varios modelos de onda, dependiendo de cuál de estos cuatro términos se considere insignificante en comparación con los términos restantes.
La siguiente tabla proporciona una referencia rápida a los distintos modelos de ondas que son reconocidos en la práctica.
Término I II III IV
Ecuación 1 ∂u u ∂u ∂d
de movimiento ____ _____
+ ____ _____ + _____ + (Sf - So ) = 0
g ∂t g ∂x ∂x
| (2) |
El modelo de onda y los términos usados para describirlo son: (1) Onda cinemática IV; (2) onda de difusión III + IV; (3) onda dinámica permanente II + III + IV; (4) onda dinámica I + II + III + IV; y (5) onda de gravedad I + II + III.
4. ANÁLISIS DE PEQUEŃAS PERTURBACIONES
Con el fin de proporcionar una forma conveniente de tener en cuenta explícitamente los diversos modelos de onda, la Ec. 9 queda redefinida como:
l ∂u' auo ∂u' ∂d' u' d'
____ _____
+ _____ _____ + p _____ + k So ( 2 _____ - _____ ) = 0
g ∂t g ∂x ∂x uo do
| (10) |
en el cual l, a, p, y k son números enteros y pueden tomar valores de 0 a 1 solamente, dependiendo de cuáles términos de la Ec. 9 se utilicen para describir el movimiento.
La solución para una pequeńa perturbación se postula en la siguiente forma exponencial:
d'
____ = d* e i (σ* x* - β* t* )
do
| (11) |
en la cual d' es una pequeńa perturbación a do; d* es una función adimensional de amplitud de profundidad; σ* es un número de onda adimensional, β* es un factor de propagación adimensional complejo, y x* and t* son coordenadas espaciales y temporales adimensionales tales que:
2 π
σ* = (
_____ ) Lo
L
| (12) |
2 π Lo
β*R = (
_____ ) _____
T uo
| (13) |
|
β*I = factor de propagación de amplitud
| (14) |
en la cual L = longitud de onda de la perturbación; y T = período. El valor Lo = longitud horizontal en la cual el flujo uniforme permanente desciende una altura igual a su profundidad, definida como Lo =
do /So. La celeridad adimensional de la perturbación viene dada por:
L / T β*R
c* =
________ = _______
uo σ*
| (17) |
La atenuación de la onda sigue una ley exponencial en la cual la amplitud en un tiempo dado t = amplitud inicial en el tiempo to multiplicada por (e β*I t* ), en la cual t* = (t - to) uo / Lo. Cuando comparamos las amplitudes de onda después de un período de propagación, el valor de t* es t* = T uo / Lo, o igualmente, t* = 2 π / | β*R |. El decremento logarítmico δ se define como sigue: δ = β* T u o / Lo, o δ = 2 π β*I / | β*R | (10). El valor de δ es una medida de la velocidad a la que el componente no permanente del movimiento cambia con la propagación. Para δ positivo, se produce amplificación; para δ negativo, el movimiento (no permanente)
se atenúa y eventualmente desaparece.
La profundidad de perturbación está asociada con una velocidad de perturbación de la forma:
u'
____ = u* e i (σ* x* - β* t* )
uo
| (18) |
en la cual u* es una función adimensional de amplitud de velocidad. La sustitución de las Ecs. 11 y 18 en las Ecs. 4 y 10 lleva, respectivamente, a lo siguiente:
σ* u*
+ (σ* - β* ) d* = 0
| (19) |
[ 2k + i Fo2 (α σ* -
l β* ) ] u*
+ (i p σ* - k ) d* = 0
| (20) |
en la cual:
uo 2
Fo2 = ______
g do
| (21) |
Las ecuaciones 19 y 20 constituyen un sistema homogéneo de ecuaciones lineales con las incógnitas u* and d*. Para que la solución no sea trivial, el determinante de la matriz de coeficientes debe anularse. En consecuencia:
i l β* 2 Fo2 - i
σ*2 (p - a Fo2 ) + 3 k σ* -
2 k β* - i σ* β* (l + a) Fo2 = 0
| (22) |
La Ec. 22 es la ecuación característica que gobierna la propagación de ondas de pequeńa amplitud. En el tratamiento que sigue, se realizan aproximaciones sucesivas para ajustarse a los diversos tipos de modelos de ondas considerados en la sección anterior.
5. MODELO DE ONDA CINEMÁTICA
En el modelo de onda cinemática, los términos de inercia y presión son despreciables en comparación con los términos de pendiente de fondo y de fricción.
En consecuencia, en la Ec. 22, l = a = p = 0; y k = 1, resultando en:
Dado que todos los términos imaginarios se han eliminado en la Ec. 23, β*I = 0; y β*R = β*. El decremento logarítmico δk es, entonces:
β*I
δk = 2π
_____ = 0
β*R
| (24) |
y la celeridad adimensional de la onda cinemática es:
β*R 3
c* k = _____ = ____
T 2
| (25) |
Las Ecuaciones 23-25 justifican las siguientes conclusiones con respecto a la propagación de ondas cinemáticas: (1) Dado que la Ec. 23 es de primer orden, las ondas cinemáticas se propagan solo en la dirección aguas abajo; (2) la celeridad de una onda cinemática es independiente de Fo y σ* e igual a 1.5 veces la velocidad media del flujo; y (3) la atenuación de una onda cinemática es cero, es decir, una onda cinemática se propaga aguas abajo sin disipación.
6. MODELO DE ONDA DE DIFUSIÓN
En el modelo de onda de difusión, los términos de inercia se consideran despreciables, pero el término de presión se tiene en cuenta en los cálculos. En consecuencia, en la Ec. 22, l = a = 0; p = k = 1, resultando en.
|
- i σ* 2 + 3 σ* - 2 β* = 0
| (26) |
3 σ* - i σ* 2
β* =
______________
2
| (27) |
y la celeridad de la onda de difusión es:
β*R 3
c*d = _____ = _____
σ* 2
| (28) |
El decremento logarítmico de la onda de difusión es:
β*I σ*
δd = 2 π ______ =
- 2 π ( ____ )
β*R 3
| (29) |
Las siguientes conclusiones son aplicables a las ondas de difusión: (1) Debido a que la Ec. 26 es de primer orden en β*, las ondas de difusión se propagan sólo aguas abajo, y su celeridad es independiente de Fo y σ* y es igual a 1.5 de la velocidad media del flujo; y (2) las ondas de difusión se atenúan a medida que se propagan aguas abajo, y la tasa de atenuación es controlada por el número de onda adimensional σ*. Cuanto mayor sea el número de onda adimensional, mayor será la atenuación.
7. MODELO DE ONDA DINÁMICA PERMANENTE
En el modelo de onda dinámica permanente, el término de inercia convectiva
se incluye en el problema, pero se desprecia el término de inercia local. En consecuencia, en la Ec. 22, l = 0; y a = p = k = 1, resultando en:
|
- i σ* 2 (1 - Fo2 ) + 3 σ* - 2 β* - i σ* β* Fo2 = 0
| (30) |
3 σ* - i σ*2 ( 1 - Fo2 )
β*
= _______________________
2 + i σ* Fo2
| (31) |
σ* [ 6 - σ*2 Fo2 ( 1 - Fo2 )] - i σ*2 ( 2 + Fo2 )
β*
= ___________________________________________
4 + σ*2 Fo4
| (32) |
De la Ecuación 32, la celeridad del modelo dinámico permanente es:
2 - σ* 2 Fo2
c*s
= 1 + ______________
4 + σ*2 Fo4
| (33) |
El decremento logarítmico del modelo dinámico permanente es:
σ* ( 2 + Fo2 )
δs
= - 2 π ________________________
| 6 - σ*2 Fo2 ( 1 - Fo2 ) |
| (34) |
Las siguientes conclusiones son derivadas con respecto al modelo dinámico permanente: (1) La propagación de la onda dinámica permanente es en una dirección, ya que la Ec. 30 es de primer orden en β*; y (2) las características de celeridad y atenuación son funciones del número de Froude Fo del flujo uniforme permanente y del número de onda adimensional σ*.
8. MODELO DE ONDA DINÁMICA
En el modelo de onda dinámica, se consideran todos los términos de la ecuación de movimiento.
Por lo tanto, en la Ec. 22, l = a = p = k = 1.
Esto lleva a lo siguiemte:
|
Fo2 β*2 - 2 ( σ* Fo2 - i ) β* - [ σ*2 ( 1 - Fo2 ) + 3 σ* i ] = 0
| (35) |
La Ecuación 35 es de segundo orden, lo que resulta en dos raíces. Desde el punto de vista físico, las ondas dinámicas se propagan a lo largo de dos trayectorias características, que puede ser, ya sea: (1) una, aguas arriba y otra, aguas abajo; o (2) ambas aguas abajo. En el caso de que la propagación se dé en diferentes direcciones, es conveniente definir como onda primaria la onda que viaja aguas abajo, e identificar su celeridad y decremento logarítmico como c*1 y δ1, respectivamente; la onda secundaria se define como la onda que viaja aguas arriba con celeridad c*2 y decremento logarítmico δ2. En el caso de que ambas ondas viajen aguas abajo, la onda primaria es la onda más rápida y la onda secundaria es la más lenta.
La solución de la Ec. 35 es:
1
β* =
σ* ( 1 - i ζ ) + σ* [ ( ______ - ζ 2 ) + i ζ ] 1/2
Fo2
| (36) |
en la cual:
1
ζ =
_________
σ* Fo2
| (37) |
Una expresión similar a la Ec. 37 se conoce en la literatura como número de flujo cinemático (9).
El argumento de la raíz cuadrada compleja se puede expresar en forma polar como sigue:
|
A + i B = C ( cos θ + i sen θ )
| (38) |
en la cual:
1
A =
______ - ζ 2
Fo2
| (39) |
1
C = [ (
______ - ζ 2 ) 2 + ζ 2 ] 1/2
Fo2
| (41) |
y la raíz del argumento complejo es:
θ + 2 k π θ + 2 k π
(A + i B )1/2 = C1/2 ( cos _________ + i sen __________ ) ; para k = 0,1
2 2
| (43) |
Usando las relaciones de ángulo medio se obtiene:
1 + cos θ 1 - cos θ
(A + i B )1/2 = ± C1/2 [ ( __________ )1/2 + i ( __________ )1/2 ]
2 2
| (44) |
en la cual se ha hecho uso del caso en el que para ζ ≥ 0, θ/2 se encuentra en el primer cuadrante.
Desde que:
se concluye que:
C + A C - A
(A + i B )1/2 = ± [ ( ________ )1/2 + i ( ________ )1/2 ]
2 2
| (46) |
o bien:
C + A C - A
β* = σ* (1 - i ζ ) ± σ* [ ( ________ )1/2 + i ( ________ )1/2 ]
2 2
| (47) |
De la Ec. 47, se obtienen las siguientes dos raíces:
C + A C - A
β*1 = σ* [ 1 + ( ________ )1/2 ] - i σ* [ ζ - ( ________ )1/2 ]
2 2
| (48) |
C + A C - A
β*2 = σ* [ 1 - ( ________ )1/2 ] - i σ* [ ζ + ( ________ )1/2 ]
2 2
| (49) |
Definiendo:
C + A
D = (
_________ ) 1/2
2
| (50) |
y
C - A
E = (
_________ ) 1/2
2
| (51) |
las funciones de celeridad y atenuación vienen dadas por las siguientes relaciones:
Para la onda primaria:
C + A
c*1 = 1 + (__________ ) 1/2
2
| (52) |
ζ - E
δ1 = - 2π _____________
| 1 + D |
| (53) |
Para la onda secundaria:
C + A
c* 2 = 1 - (
_________ ) 1/2
2
| (54) |
ζ + E
δ2 = - 2π ___________
| 1 - D |
| (55) |
| TABLA 1. Características de propagación de ondas en aguas poco profundas en el flujo en canales abiertos.
|
Tipo de onda
(1) | Celeridad relativa c*r
(2) | Decremento logarítmico δ
(3) |
| Cinemática |
1/2 |
0 |
| Difusión |
1/2
|
- 2 π ( σ* / 3 ) |
| Dinámica permanente |
( 2 - σ*2 Fo2 ) / ( 4 + σ*2 Fo4 ) |
- 2 π σ* ( 2 + Fo2 ) / | 6 - σ*2 Fo2 ( 1 - Fo2 ) | |
| (a) Dinámica
|
| Onda primaria |
+ [(C + A ) / 2 ] 1/2 |
- 2 π ( ζ - E ) / | 1 + D | |
| Onda secundaria |
- [(C + A ) / 2 ] 1/2 |
- 2 π ( ζ + E ) / | 1 - D | |
| (b) Gravedad
|
| Onda primaria |
+ 1 / Fo |
0 |
| Onda secundaria |
- 1 / Fo |
0 |
Notas: ζ = 1 / ( σ* Fo2 ) ; A = ( 1 / Fo2 ) - ζ 2 ; C = { [ ( 1 / Fo2 ) - ζ 2 ] 2 + ζ 2 } 1/2 ; D = [ (C + A ) / 2 ] 1/2 ;
E = [ (C - A ) / 2 ] 1/2 .
|
|
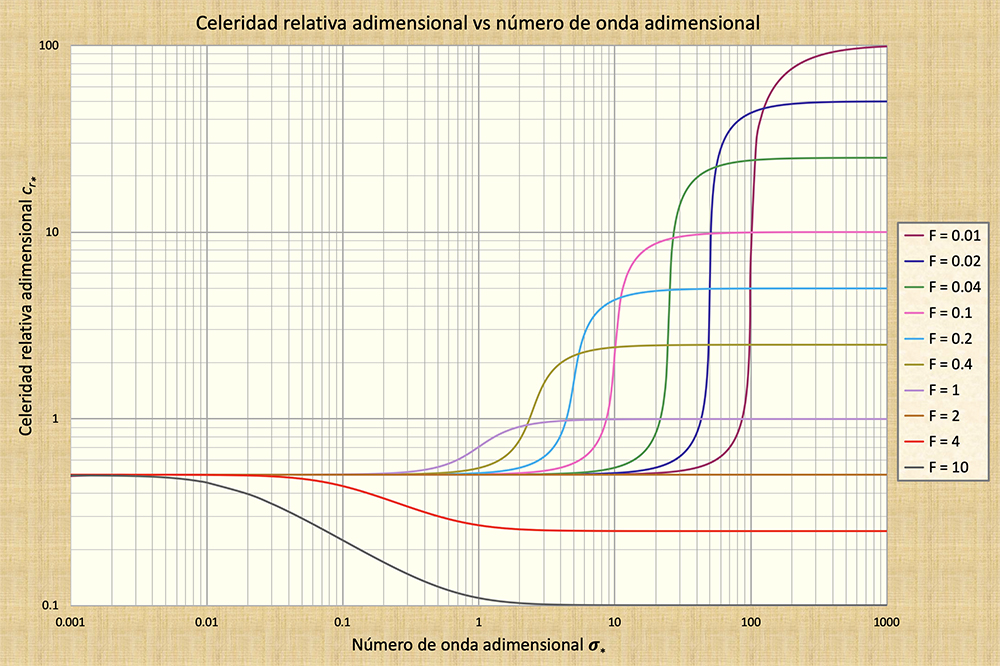
Fig. 1 Celeridad relativa adimensional c*r versus el número de onda adimensional σ*;
parámetro de curva: número de Froude Fo (0.01 ≤ Fo ≤ 10).
|
9. MODELO DE ONDA DE GRAVEDAD
En el modelo de onda de gravedad, los términos de fricción y pendiente de fondo son excluidos de la ecuación del momento. De ello se deduce que, en la Ec. 22, l = a = p = 1; y k = 0, resultando en lo siguiente:
|
β*2 Fo 2 - 2 σ* β* Fo 2 - σ* 2 (1 - Fo 2 ) = 0
| (56) |
Dado que la Ec. 56 es de segundo orden en β* y no contiene términos imaginarios, las ondas de gravedad tienen dos direcciones características y no están sujetas a atenuación.
Resolviendo para β*R en la Ec. 56:
Fo 2 ± Fo
β*R = σ* (
___________ )
Fo 2
| (57) |
y la celeridad de una onda de gravedad está dada por:
β*R 1
c* g = _____ = 1 ± _____
σ* Fo
| (58) |
o, de la forma más habitual de expresarlo (la fórmula de Lagrange):
|
cg = uo ± ( g do )1/2
| (59) |
Las ondas de gravedad se propagan a lo largo de dos direcciones características. En el flujo subcrítico, una dirección es aguas abajo con celeridad c1 = uo + (g do)1/2, y la otra es aguas arriba, con celeridad c2 = uo - (g do)1/2. En el flujo crítico, c1 = 2uo; y c2 = 0. En el flujo supercrítico, ambas ondas viajan aguas abajo, con celeridades
c1 = uo + (g do)1/2; y c2 = uo - (g do)1/2.
La Tabla 1 contiene un resumen de las características de propagación de las ondas. La celeridad que se muestra en la Tabla 1 es la celeridad relativa c* r , en la cual:
10. ANÁLISIS DEL MODELO DE ONDA DINÁMICA
Las Ecuaciones 52-55 permiten calcular las características de propagación del modelo de onda dinámica, en función del número de Froude Fo del flujo uniforme permanente y el número de onda adimensional σ* de la perturbación sinusoidal superpuesta.
La Figura 1 muestra los valores calculados de la celeridad relativa adimensional c*r versus el número de onda adimensional σ* para números de Froude entre 0.01-10. Se derivan las siguientes conclusiones:
Hay tres grupos bien definidos en el espectro del número de onda: (a) un grupo cinemático correspondiente a valores pequeńos del número de onda σ*, en la cual la celeridad relativa c*r es independiente tanto de σ* como del número de Froude Fo; (b) un grupo de gravedad correspondiente a valores grandes de σ*, en la cual c*r es independiente de σ* y depende únicamente de Fo ; y (c) un grupo dinámico, en la que c*r es una función tanto de σ* y Fo.
En el grupo cinemático, c*r se acerca asimptóticamente a 0.5, que corresponde al de una onda cinemática. En el grupo de gravedad, c*r se aproxima asintóticamente al valor 1/Fo, que corresponde al de una onda de gravedad. En el grupo dinámico, c*r se encuentra entre los valores de celeridad de las ondas cinemática y de gravedad.
La ubicación del grupo dinámico en el espectro de σ* es una función de Fo.
Un corolario resultante de la Fig. 1 es que para Fo = 2, c*r = 0.5 para todos los valores de σ*. Así, para Fo = 2, todas las ondas, cinemática, dinámica y de gravedad, tienen celeridades iguales al valor cinemático. Las conclusiones de la Fig. 1 con respecto al valor límite de c*r , en los grupos cinemático y de gravedad se pueden obtener analíticamente con base en la teoría de límites. Se puede demostrar que cuando σ* → ∞ , c*r → 1/Fo , y cuando σ* → 0, c*r → 0.5 (para Fo constante).
El cálculo de los decrementos logarítmicos δ1 y δ2 en función de σ* y Fo, mediante las Ecs. 53 y 55
permite las siguientes conclusiones generales:
Para Fo < 2, las ondas primarias se propagan aguas abajo y se atenúan; para Fo = 2, las ondas primarias se propagan aguas abajo y no se amplifican ni atenúan en todo el espectro de σ*; para Fo > 2 las ondas primarias se propagan aguas abajo y se amplifican.
Para Fo < 1, las ondas secundarias se propagan aguas arriba
(c*r > 1), o aguas abajo (c*r < 1). Para F = 1, las ondas secundarias permanecen estacionarias (c*r = 1), o se propagan aguas abajo (c*r < 1). Para Fo > 1, las ondas secundarias se propagan aguas abajo. Las ondas secundarias se atenúan para todos los valores de Fo y σ*.
La Tabla 2 resume las conclusiones del párrafo anterior.
| TABLA 2. Características de celeridada y atenuaciónb de la onda dinámica. |
Número de Froude
(1)
| Onda primaria
| Onda secundaria
|
c*1
(2)
| δ1
(3)
| c*2
(4)
| δ2
(5)
|
| Fo < 1
| +
| -
| -
| -
|
| +
| -
|
| Fo = 1
| +
| -
| 0
| -
|
| +
| -
|
| 1 < Fo < 2
| +
| -
| +
| -
|
| Fo = 2
| +
| 0
| +
| -
|
| Fo > 2
| +
| +
| +
| -
|
a Celeridad aguas abajo + ; celeridad aguas arriba -.
b Atenuación - ; amplificación +.
|
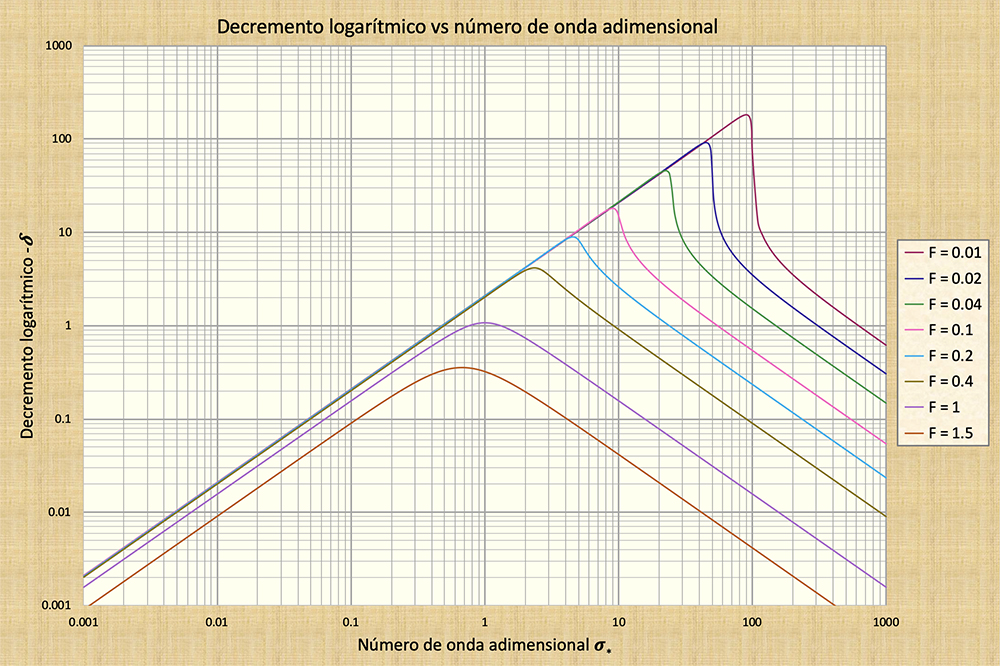
Análisis de la atenuación de la onda primaria, Fo < 2. La Figura 2 muestra la variación del decremento logarítmico δ1 para Fo < 2, en función de σ*.
Se extraen las siguientes conclusiones: (1) El decremento logarítmico δ1 es máximo (en valor absoluto) para un valor de σ* correspondiente al punto de inflexión de la curva c*r versus σ* (Fig. 1). El valor de σ* para el cual δ1 es máximo (en valor absoluto) disminuye al aumentar Fo; y (2) el decremento logarítmico δ1 es mínimo (en valor absoluto) en ambos extremos del espectro de σ*. Cuando σ* → 0, entonces δ1 → 0, lo cual corresponde al caso de la onda cinemática; cuando σ* → ∞, entonces δ1 → 0, lo cual corresponde al caso de la onda de gravedad.
Una conclusión general que se deriva de la Fig. 2, se refiere al hecho de que para Fo < 2, las ondas primarias están sujetas a una atenuación muy fuerte en el grupo dinámico y a una atenuación muy débil en los grupos cinemático y de gravedad.
|
Fig. 2 Decremento logarítmico -δ1 de la onda primaria versus el número de onda adimensional σ*
;
parámetro de curva: número de Froude Fo ( Fo < 2 ).
|
|
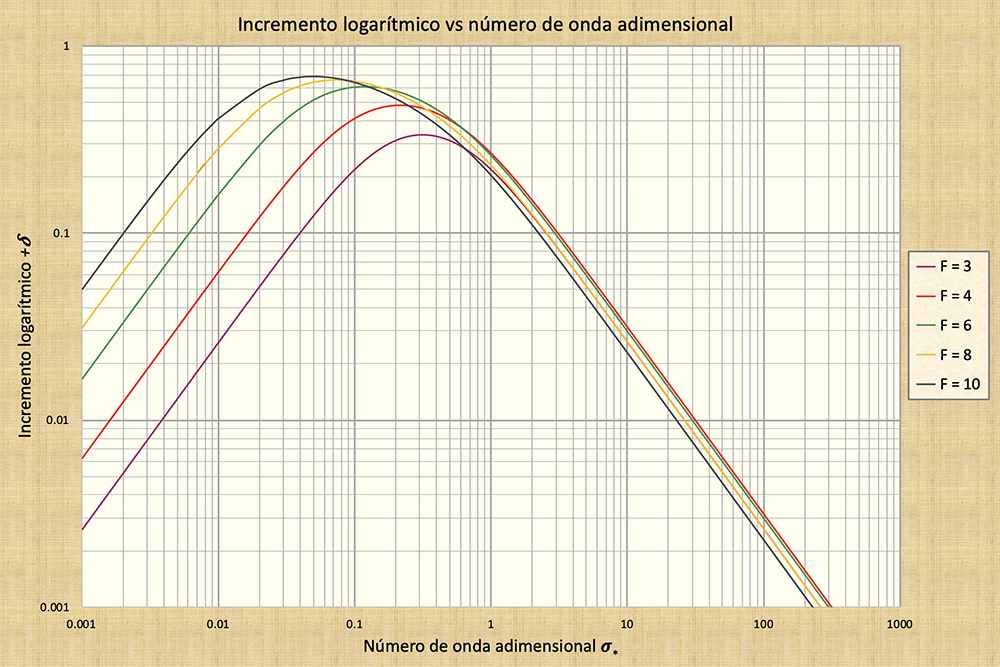
Análisis de la amplificación de la onda primaria, Fo > 2. La Figura 3 muestra la variación del decremento logarítmico δ1, para Fo > 2, en función de σ*. Se extraen las siguientes conclusiones: (1) El decremento decremento/incremento logarítmico δ1 tiene un valor máximo positivo en un valor de σ* correspondiente al punto de inflexión de la curva c*r versus σ* (Fig. 1). El valor de σ* para el cual δ1 es máximo disminuye al aumentar Fo; y (2) el decremento logarítmico δ1 es mínimo en ambos extremos del espectro σ*. Cuando σ* → 0, entonces δ1 → 0, lo cual corresponde al caso de la onda cinemática; cuando σ* → ∞, entonces δ1 → 0, lo cual corresponde al caso de la onda de gravedad.
Una conclusión general derivada de la Fig. 3 se relaciona con el hecho de que para Fo > 2, las ondas primarias están sujetas a una amplificación muy fuerte en el grupo dinámico y a una amplificación muy débil en los grupos cinemático y de gravedad.
|
Fig. 3 Incremento logarítmico +δ1 de la onda primaria, versus el número de onda adimensional σ*;
parámetro de curva: número de Froude Fo ( Fo > 2 ).
|
|
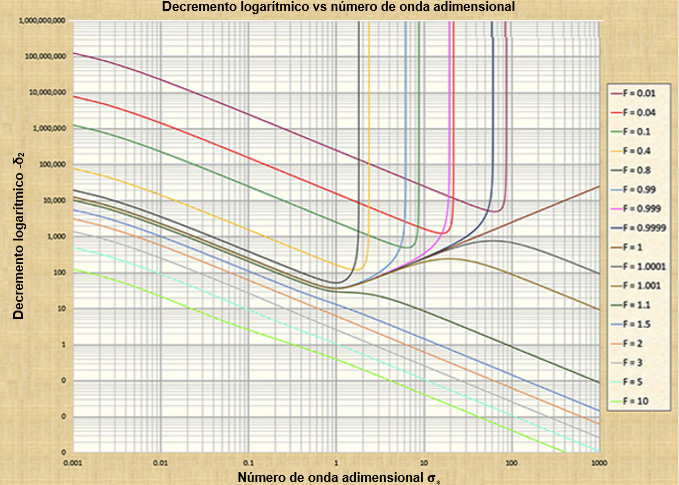
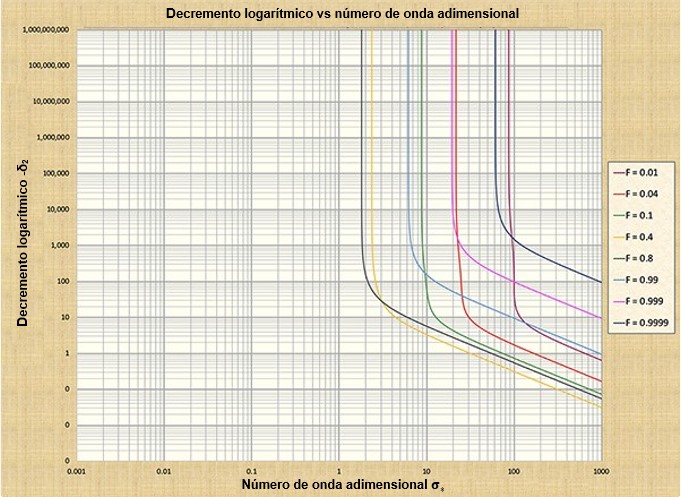
Análisis de atenuación de la onda secundaria. Las Figuras 4 (a) y 4 (b) representan la variación del decremento logarítmico δ2 para 0.01 ≤ Fo 10 en función de σ*.Se extraen las siguientes conclusiones: (1) En el flujo subcrítico, Fo < 1, la atenuación de la onda secundaria es muy fuerte y la fuerza disminuye a medida que σ* aumenta en el grupo de gravedad (σ* grande); (2) en el flujo crítico, Fo = 1, la atenuación de la onda secundaria es muy fuerte, con un mínimo alrededor del centro del grupo dinámico (valor intermedio de σ*); y (3) en el flujo supercrítico, Fo > 1 la atenuación de la onda secundaria tiene el patrón mostrado. Para Fo ≥ 2, δ2 disminuye a medida que σ* aumenta.
|
(a)
|
(b)
Fig. 4 Decremento logarítmico - δ2 de la onda secundaria versus el número de onda adimensional σ*;
parámetro de curva: número de Froude Fo : (a) 0.01 ≤ Fo ≤ 10; (b) 0.01 ≤ Fo ≤ 0.999.
|
|
11. PROPAGACIÓN DE LA ONDA DINÁMICA
La propagación de las ondas en aguas poco profundas está controlada por el balance de las diversas fuerzas incluidas en la ecuación de movimiento. En la Ec. 2, el primer término representa la inercia local, el segundo la inercia convectiva, el tercer término la diferencia de presiones y el cuarto representa la acción conjunta de las pendientes de fricción y de fondo. Se pueden construir varios modelos de onda, dependiendo de cuál de estos cuatro términos se considere insignificante en comparación con los términos restantes.
Se ha demostrado que la propagación de una onda dinámica es una función de dos parámetros adimensionales: el número de onda σ* y el número de Froude Fo. El número de onda σ* se puede interpretar como una relación de dos longitudes Lo and L, en la cual L es la longitud de onda y Lo es la longitud horizontal en la que el flujo uniforme permanente desciende una altura (carga) igual a su profundidad. El cuadrado del número de Froude Fo es la relación entre el doble de la altura (carga) de velocidad y la profundidad de flujo, en la cual la altura (carga) de velocidad huo es:
uo2
huo = ______
2 g
| (61) |
Para Fo < 2, la celeridad de una onda dinámica que se propaga aguas abajo es mayor que la celeridad de la onda cinemática y menor que la celeridad de la onda de gravedad. De hecho, la celeridad de la onda cinemática constituye un límite inferior al que tiende el valor dinámico a medida que el número de onda σ* disminuye. Por el contrario, la celeridad de la onda de gravedad es un límite superior a la celeridad de la onda dinámica a medida que aumenta el número de onda σ*. Para situar esta conclusión en la perspectiva adecuada,
citamos aquí el trabajo de Stoker [(8), p. 486], con respecto a las celeridades de pequeńas perturbaciones y ondas progresivas:
"Lo que al parecer sucede es lo siguiente: los pequeńos iniciadores de una perturbación viajan con una velocidad (gd)1/2 relativa a la corriente de flujo, pero las fuerzas de resistencia actúan de tal manera que disminuyen la velocidad de la porción principal de la perturbación, muy por debajo de los valores dados por (gd)1/2; es decir, para un valor
que corresponde a la velocidad de una onda progresiva permanente que viaja sin cambios de forma..."
|
Al revisar el trabajo de Stoker, es evidente que su referencia a una pequeńa perturbación es a una onda con un gran valor de σ* (onda de gravedad) y a una onda progresiva a aquélla con un pequeńo valor de σ* (onda cinemática). Stoker prosigue elaborando en las limitaciones de los métodos de enrutamiento del flujo basados únicamente en el enfoque cinemático, para los casos en que los efectos dinámicos no pueden ignorarse.
Para Fo ≥ 2, la celeridad de una onda dinámica que se propaga aguas abajo es menor que la celeridad de la onda cinemática y mayor que la celeridad de la onda de gravedad. De hecho, la celeridad de la onda cinemática es un límite superior al valor dinámico, mientras que la celeridad de la onda de gravedad es un límite inferior al valor dinámico.
Se puede obtener una conclusión significativa con respecto a la propagación dinámica de ondas del resumen presentado en la Tabla 2. Para ondas primarias, Fo = 2 es el umbral que divide las tendencias de atenuación (Fo < 2) y amplificación (Fo > 2). Para ondas secundarias, sin embargo, Fo = 1 es el umbral que divide la propagación aguas arriba (Fo < 1) o aguas abajo (Fo > 1) para ondas de gravedad. Por lo tanto, se comprueba que Fo = 2 es un valor umbral tan importante como Fo = 1 para describir la dinámica de los fenómenos de flujo en un canal abierto.
12. RESUMEN Y CONCLUSIONES
Las características de propagación de varios tipos de ondas en aguas poco profundas, en el flujo de un canal abierto, se calculan usando la teoría de la estabilidad lineal. Se derivan las funciones de celeridad y atenuación de las ondas cinemática, de difusión, dinámica permanente, dinámica y de gravedad. Para el caso más general, es decir, el modelo de onda dinámica, las características de propagación se expresan como una función del número de Froude del flujo uniforme permanente y el número de onda adimensional correspondiente al componente no permanente.
Para el modelo dinámico, el espectro del número de onda se divide en tres grupos: (1) Un grupo de gravedad, que corresponde a un número de onda grande, en la cual la celeridad de la onda es la celeridad de la onda de gravedad; (2) un grupo cinemático, que corresponde a un número de onda pequeńo en el cual la celeridad de la onda es la celeridad de la onda cinemática; y (3) un grupo dinámico, que corresponde a los valores medios del espectro del número de onda, en la cual la celeridad de la onda se encuentra entre los valores de celeridad cinemática y de gravedad.
Las ondas dinámicas primarias se propagan aguas abajo y se atenúan para Fo < 2 y se amplifican para Fo > 2. En el umbral de Fo = 2, ondas dinámicas primarias no se atenúan ni amplifican.
Para Fo ≤ 1, las ondas dinámicas secundarias se propagan aguas arriba o aguas abajo, según el número de onda. Para Fo = 1, las ondas dinámicas secundarias permanecen estacionarias o se propagan aguas abajo, dependiendo del número de onda. Para Fo > 1, las ondas secundarias se propagan aguas abajo. Las ondas secundarias se atenúan en todo el espectro del número de onda.
13. APLICACIONES
El análisis de este trabajo proporciona un marco apropiado para el estudio sistemático de las ondas en aguas poco profundas, en el flujo de un canal abierto. Se prevén numerosas aplicaciones, entre las cuales las más importantes son:
La evaluación de la precisión de los modelos cinemáticos y de ondas de difusión, y la determinación de los criterios para su aplicabilidad.
El estudio de la formación de ondas de rollo (ondas pulsantes) en el flujo en canales abiertos. La presente teoría valida el hecho observado de que las ondas de rollo se forman para Fo > 2, ya que no puede haber amplificación de onda para Fo ≤ 2 (usando la fricción de Chezy).
La teoría permite una comparación de los diversos modelos aproximados de ondas y una evaluación de sus propiedades y limitaciones.
Por último, la teoría proporciona un tratamiento coherente de la propagación de ondas en el flujo en canales abiertos. Las conclusiones podrían ser de interés para ingenieros y científicos que se ocupan de fenómenos de flujo no permanente en canales abiertos.
APÉNDICE I. BIBLIOGRAFÍA
-
DeSaint-Venant, B. 1871. "Theorie du Mouvement Non-permanent des Eaux avec Application aux Crues des Rivieris et I' Introduction des Varies dans leur Lit," Competes Rendus Hebdomadaires des Seances de l'Academie des Science, Paris, France, Vol. 73, 148-154.
-
Henderson, F. M. 1966, Open Channel Flow, The MacMillan Co., New York, N.Y.
-
Lagrange, I. L. "Mémoire sur la Théorie du Mouvement des Fluides," Bulletin de la Classe des Sciences Academie Royal de Belique, No. 1783, 151-198.
-
Liggett, J. A. 1975. "Basic Equations of Unsteady Flow," Unsteady Flow in Open Channels, K. Mahmood and V. Yevjevich, ed., Vol. 1, Water Resources Publications, Fort Collins, Colo.
-
Lighthill, M. J. and G. D. Whitham. 1955. "On Kinematic Waves I, Flood Movement in Long Rivers," Proceedings of the Royal Society of London, Vol. A229, May, 281-316.
-
Lin, C. C. 1966.The Theory of Hydrodynamic Stability, 1st ed., The Cambridge University Press, London, England.
-
Ponce, V. M., and K. Mahmood. 1976. "Meandering Thalwegs in Straight Alluvial Channels," Proceedings of the 3rd Annual Symposium, ASCE, Waterways, Harbors, and Coastal Engineering Division, Vol. 2, Aug., 1418-1441.
-
Stoker, J. J. 1957. Water Waves, the Mathematical Theory with Applications, Wiley Interscience Publishers, Inc., New York, N.Y.
-
Woolhiser, D. A., and J. A. Liggett. 1967. "Unsteady One-Dimensional Flow over a Plane-The Rising Hydrograph," Water Resources Research, Vol. 3, No. 3, Third Quarter, 753-771.
-
Wylie, C. R. 1966. Advanced Engineering Mathematics, 3rd ed., McGraw-Hill Book Co., New York, N.Y.
APÉNDICE II. NOTACIÓN
En este documento se utilizan los siguientes símbolos:
A = parámetro, definido por la Ec. 39;
a = número entero;
B = parámetro, definido por la Ec. 40;
C = parámetro, definido por la Ec. 41;
Cf = coeficiente de Chezy;
D = parámetro, definido por la Ec. 50;
d = profundidad de flujo;
E = parámetro, definido por la Ec. 51;
Fo = número de Froude de flujo uniforme permanente;
f = factor de fricción, definido por la Ec. 7;
g = aceleración de la gravedad;
hu = carga de velocidad;
k = número entero;
L = longitud de onda;
Lo = longitud horizontal en cual el flujo permanente cae una altura igual a su profundidad;
l = número entero;
p = número entero;
Sf = pendiente de fricción;
So = pendiente de fondo;
T = período de onda;
u = velocidad media;
β*I = factor de amplitud de propagación;
β*R = frecuencia adimensional;
γ = peso unitario del agua;
δ = decremento logarítmico;
ζ = un tipo de número de flujo cinemático, según lo definido por la Ec. 37;
θ = parámetro, definido por la Ec. 43;
σ* = número de onda adimensional;
τ = esfuerzo cortante de fondo; y
∞ = infinito.
Subíndices
d = onda difusiva;
g = onda de gravedad;
I = imaginario;
k = onda cinemática;
o = flujo uniforme permanente;
R = real;
r = relativo al flujo principal;
s = onda dinámica permanente;
1 = onda dinámica primaria; y
2 = onda dinámica secundaria.
Superíndices
' = variable de perturbación; y
* = función adimensional.
|
|
|